Průmyslové roboty se vyznačují ultravysokou flexibilitou a přesností, nízkými požadavky na pracovní prostředí, udržitelným provozem, stabilní kvalitou výrobků a vysokou efektivitou. Továrna zavedla šestiosé manipulační roboty Yaskawa GP12 za účelem vytvoření automatického systému nakládání a vykládání na montážní linku.
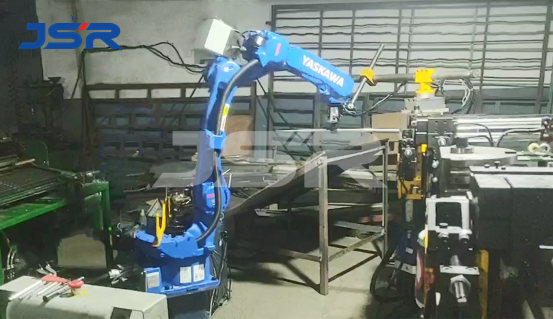
Jedná se o firmu, která se zabývá prodejem jízdních kol a GP12 pracuje na nakládání a vykládání řídítek jízdních kol. Potřebuje přesunout ocelovou trubku z bodu A k ohýbačce trubek. Po opracování ji ohýbačka trubek vyjme a přesune do bodu B. Je třeba ji přesně odebrat.
Implementace programu:
1. Inženýr provede přiměřené plánování uspořádání a výstavby v souladu se skutečným pracovním prostředím na staveništi zákazníka.
2. Proveďte zapojení signální interakce podle signálů požadovaných externím polním zařízením a robotem.
3. Naprogramoval jsem logický program robota a naučil trajektorii robota.
4. Zkušební běhy programu splňují požadavky na řízení a potřeby výroby.
5. Dokončeno instalace a ladění na místě a poskytnuto školení zákazníků v obsluze zařízení.
6. Po několika dnech práce má zařízení na místě nulovou poruchovost, což umožňuje nepřetržitou 24hodinovou výrobu továrny.
Manipulační robot snižuje pracovní náročnost pracovníků, zlepšuje produkci a efektivitu práce, zajišťuje osobní bezpečnost pracovníků a realizuje automatizaci, inteligenci a humanizaci. Jiesheng je ochoten poskytnout každému zákazníkovi řešení průmyslové robotické automatizace na míru.

Čas zveřejnění: 9. listopadu 2022
